diffusion模型介绍
Diffusion模型
1 介绍
扩散模型本质是学习真实的数据分布,从而从中抽样,生成新样本。
diffusion过程:不断给真实图片加噪声,直至变成纯噪声。如何,训练一个解码器去噪,逐步进行,直至回复成原本的真实样本。
2 生成模型的目标
学习到的数据分布要尽可能符合原始训练数据分布。
- $P_{\theta}(x)$模型所产生的图片的改了分布, $\theta$表示模型的参数
- $P_{data}(x)$训练数据的概率分布,也就是真实图片的分布,$data$表示真十四数据,与模型无关。
为了衡量这两个分布之间的距离,通常使用KL散度,则目标函数表示如下:
$$ \begin{align}
\arg\min_{\theta} KL(P_{data}||P_{\theta}) &= \arg\min_{\theta} \int_x P_{data}(x) \log\frac{p_{data}(x)}{p_{\theta}(x)} \
&= \arg\min_{\theta} \left( \int_x P_{data}(x) \log P_{data}(x) - \int_x P_{data}(x) \log p_{\theta}(x) \right) \ &= \arg\max_{\theta} \left( \int_x P_{data}(x) \log p_{\theta}(x) - \int_x P_{data}(x) \log P_{data}(x) \right) (第二项为常数) \ &= \arg\max_{\theta} \int_x P_{data}(x) \log p_{\theta}(x) \ &= \arg\max_{\theta} E_{x~P_{data(x)}} \log p_{\theta}(x) \ & \approx \arg\max_{\theta} \sum_{i=1}^{m} \log p_{\theta}(x_i) (近似为从真实世界抽样m张图片) \ &= \arg\max_{\theta} \log \prod_{i=1}^{m} p_{\theta}(x_i) \ &= \arg\max_{\theta} \prod_{i=1}^{m} p_{\theta}(x_i)
\end{align} $$
从上述推导过程,我们发现,优化目标变成了使得模型产生真实图片的概率最大
3 前向噪声扩散
向原始图片逐步添加高斯噪声,直至最后的图像趋于高斯分布。
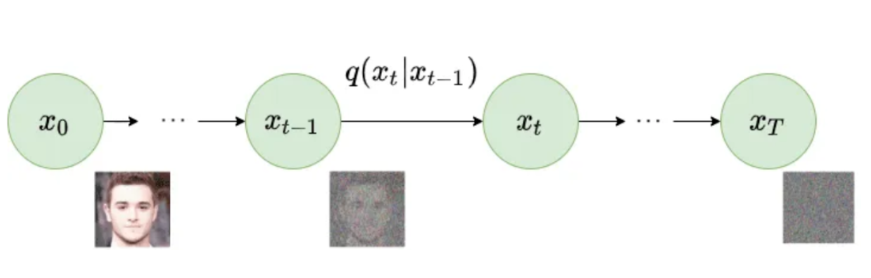
下面推导如何从初始图像得到第$t$时刻的图像:
$ x_t = \sqrt{\alpha_t} x_{t-1} + \sqrt{1- \alpha_t} \epsilon_t, \epsilon_t \in N(0,1), i.i.d$
$$ \begin{align}
q(x_t| {x_{t-1}}) &= N(x_t; \sqrt{\alpha_t} x_{t-1}, (1-\alpha_t)I) \ &= \sqrt{\alpha_t} x_{t-1} + \sqrt{1- \alpha_t} \epsilon_t \ &= \sqrt{\alpha_t} ( \sqrt{\alpha_{t-1 } } x_{t-2} + \sqrt{1- \alpha_{t-1} } \epsilon_{t-1} ) + \sqrt{1- \alpha_t} \epsilon_t \ &= \sqrt{\alpha_t \alpha_{t-1}} x_{t-2} + \sqrt{\alpha_t - \alpha_t \alpha_{t-1}} \epsilon_{t-1} + \sqrt{1- \alpha_t} \epsilon_t \ &= \sqrt{\alpha_t \alpha_{t-1}} x_{t-2} + \sqrt{1- \alpha_t \alpha_{t-1} }\epsilon (两个相互独立的正态分布相加,又均值为0,只用考虑方差) \ &= \sqrt{\alpha_t \alpha_{t-1} \alpha_{t-2} … \alpha_{1}}x_0 + \sqrt{1 - \alpha_t \alpha_{t-1} \alpha_{t-2} … \alpha_{1}} \epsilon \ &= \sqrt{\overline{\alpha_t}} x_0 + \sqrt{1 - \overline{\alpha_t}} \epsilon
\end{align} $$
4 反向扩散过程
由 $x_{t}$到$x_{t-1}$
$P(x_{t-1} | x_t) = N(x_{t-1}; u_{\theta}(x_t, t), \sum_{\theta}(x_t, t) )$
在第2节中,我们提到了生成模型的目标,即$\arg\max_{\theta} \prod_{i=1}^{m} p_{\theta}(x_i)$
这里的$x$是指前扩散的初始图像,以后都记为$x_0$, 在反向扩撒的过程中,它依赖于$x_0$之前的所有步长,从$x_T$开始往后。。。
$\log P(x_0) = \log \frac{P(x_0, x_1, x_2,…,x_T)}{ P(x_1,x_2,…,x_T | x_0)} (马尔科夫链的公式)$
上式关于$q_{(x{1:T} |x_0)}$积分
等式左边:$\int \log P(x_0) q_{(x{1:T} |x_0)} dx_{1:T} = \log P(x_0)$
等式右边:$\int \log \frac{P(x_0 :T)}{P(x_{1:T} |x_0) } q(x_{1:T} | x_0) dx_{1:T}$
故:$\log P(x_0) = \int \log \frac{P(x_0 :T)}{P(x_{1:T} |x_0) } q(x_{1:T} | x_0) dx_{1:T}$
右侧的式子经过变形可以化成以下形式:
$\log P(x_0) = \int \log \frac{P(x_{0:T})}{q(x_{1:T} | x_0)} q(x_{1:T } |x_0) dx_{1:T} + KL(q(x_{1:T} | x_0) || P(x_{1:T}|x_0))$
上述等式右边第二项有一个KL散度,但是我们并不知道$P(x_{1:T}|x_0)$,如果我们能求出$q(x_{1:T} | x_0)$,又KL散度是一个大于等于0的数,当两个概率分布相等时,KL=0,只需让右式第二项最小即可。
即最小化$ KL(q(x_{1:T} | x_0) || P(x_{1:T}|x_0))$
对于确定的训练数据$x_0$与其似然参数,$\log P(x_0)$是唯一确定的。如果最小化第二项,则最大化了第一项。
由于第二项散度恒大于等于0,所以对于第一项①,$\log P(x_0) \geq ①$, ①也被称作变分下界。
$$ \begin{align}
\log P(x_0) & \geq \int \log \frac{P(x_{0:T})}{q(x_{1:T} | x_0)} q(x_{1:T } |x_0) dx_{1:T} \ &= \mathbf{E}q[ \log \frac{P(x{0:T})}{q(x_{1:T} | x_0)}] \ &= \mathbf{E}q [\log \frac{P(x_T) P(x{0:T-1} | x_T)}{q(x_{1:T} | x_0)} ] \ &= \mathbf{E}q [\log P(x_T) + \log \frac{P(x{0:T-1} | x_T)}{q(x_{1:T} | x_0)} ] \ &= \mathbf{E}q [\log P(x_T) + \log \frac{\prod{t=1}^T P(x_{t-1} | x_t)}{\prod_{t=1}^T q(x_t | x_{t-1})} ] \ &= \mathbf{E}q [\log P(x_T) + \sum{t=1}^T \log \frac{ P(x_{t-1} | x_t)}{ q(x_t | x_{t-1})} ] \ &= \mathbf{E}q [\log P(x_T) + \sum{t=2}^T \log \frac{ P(x_{t-1} | x_t)}{ q(x_t | x_{t-1})} + \log \frac{P(x_0 | x_1)}{q(x_1 |x_0)} ]
\end{align} $$
再经过一大段推导。。。可以得到最终式子:
$\log P(x_0) \geq \mathbf{E}{q{(x_1|x_0)}}[\log P(x_0 | x_1) ] - \sum_{t=2}^T \mathbf{E}{q(x_t| x_0)} [kL(q(x{t-1}|x_t,x_0) || P(x_{t-1} | x_t))] - KL(q(x_T|x_0) || P(x_T))$
上式就是我们的优化目标!
上式的第三项可以直接求取,没有需要学习的参数
第一项式重构损失,第二项是KL散度,$P(x_{t-1}|x_t)$需要使用神经网络来逼近
对$q(x_{t-1 } | x_t,x_0) $有:
$$ \begin{align}
q(x_{t-1 } | x_t,x_0) & = \frac{q(x_{t-1},x_t | x_0)}{q(x_t |x_0)} \ &= \frac{q(x_t| x_{t-1},x_0)q(x_{t-1} | x_0)}{q(x_t |x_0)} \ &= \frac{N(\sqrt{\alpha_t} x_{t-1}, (1- \alpha_t)I) N(\sqrt{\overline{\alpha}{t-1}} x_0, (1- \overline{\alpha}{t-1})I)}{N(\sqrt{\overline{\alpha_t}} x_0, (1- \overline{\alpha_t})I)}
\end{align} $$
带入正态分布公式展开,可以得到:
$$q(x_{t-1 } | x_t,x_0) \textasciitilde N(x_{t-1} | \frac{\sqrt{\alpha_t}(1-\overline{\alpha}{t-1})x_t}{1- \overline{\alpha_t} } + \frac{\sqrt{\overline{\alpha}{t-1}}\beta_t x_0}{ 1- \overline{\alpha_t}}, \frac{1- \overline{\alpha}_{t-1}}{1- \overline{\alpha}_t}\beta_t I)$$
对上式,$x_0$未知,尝试使用一个新的分布$q(x_{t-1}|x_t)$来替代
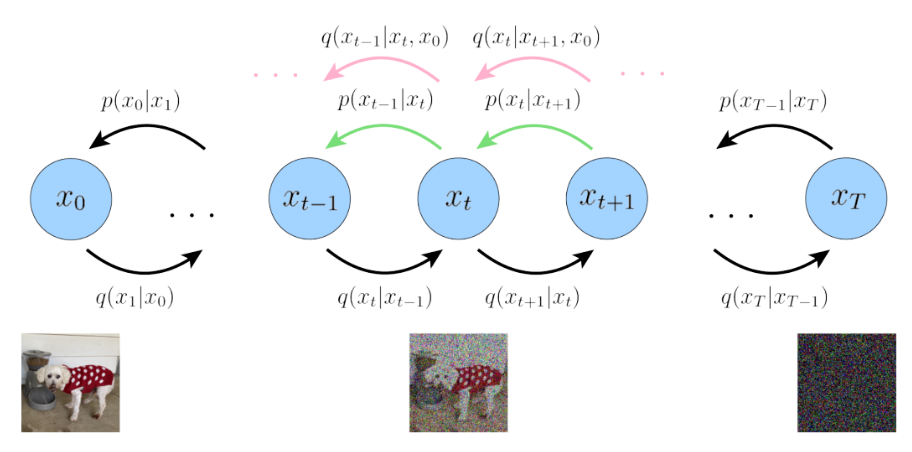
这个新的分布(绿色箭头),使其 方差与$q(x_{t-1} | x_t, x_0)$一致,而均值把 $x_0$替换成$\hat{x}_{\theta}(x_t, t)$, 即$x_0$由$x_t$和$t$基于一个深度模型预测。
接下来就是缩小$p$和$q$之间的差距,如果直接让模型从$x_t$去预测$x_0$,难度过大,在前面的前向过程中,$x_t = \sqrt{\bar{\alpha_t}}x_0 + \sqrt{(1- \bar{\alpha}_t)}\epsilon$,变成$x_0 = \frac{x_t - \sqrt{1 - \bar{\alpha}_t}\epsilon}{\sqrt{\bar{\alpha}t}}$,带入原来的$q(x{t-1}| x_t, x_0)$的均值里面:$u = \frac{1}{\sqrt(\alpha_t)}x_t - \frac{1- \alpha_t}{\sqrt{1- \bar{\alpha}_t}\sqrt{\alpha_t}}\epsilon$
则,构造的分布$p(x_{t-1}|x_t)$的均值$u = \frac{1}{\sqrt(\alpha_t)}x_t - \frac{1- \alpha_t}{\sqrt{1- \bar{\alpha}t}\sqrt{\alpha_t}}\hat{\epsilon{\theta}}$
这样,把由$x_t$,$t$去预测$x_0$ 变成了 由$x_t$,$t$去预测$\epsilon_t$。
Step5就是训练一个模型: $x_0$经过$t$时间步加噪声后的$x_t$ 和 时间步$t$ 预测出加的噪声$\epsilon$,深度学习模型是类似 UNet 的结构
5 推理过程
模型训练好之后,在真实的推理阶段就必须从时间步 T 开始往前逐步生成图片,算法描述如下:
先生成一个服从高斯分布的noise: $x_T$
从最后一个时间步开始:由上一步图像$x_t$输入模型去预测噪声$\epsilon_t$,再由冲参数化技巧,计算$x_{t-1}$,一直到时间步1为止,从而生成$x_0$。
6 实现
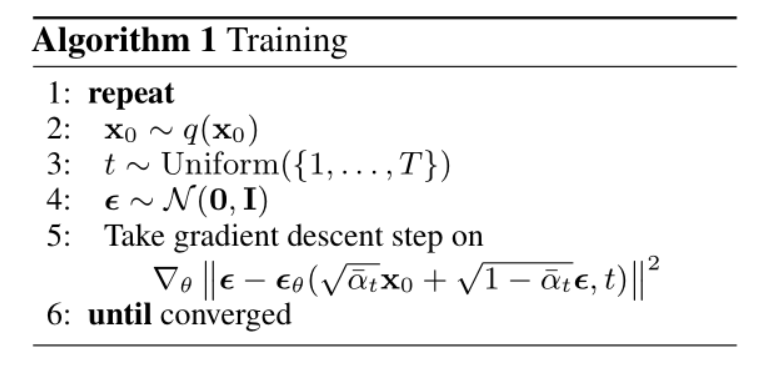
6.1 Algorithm1: Training
$x_0 $ ——> $x_t$
- 从数据中抽样本$x_0$
- 从$1$~$T$中随机抽取一个时间$t$,对该时间步做embedding
- $x_0$ + t_embedding ——>(GaussionDiffusion) ——>$x_t$
- $x_t$ + t_embedding ——> (Unet) ——> predicted noise
- 计算 predicted noise 和 GuassionDiffusion采样的noise的loss
- 重复上述步骤,直至Unet网络训练完成
前向扩散:
1 | |
预测噪声:
1 | |
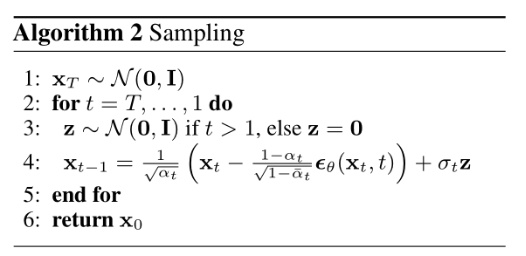
6.2 Algorithm2: Sampling
$x_t$ ——> $x_{t-1}$
从N(0,1)中采样$x_T$
对 $T, T-1, T-2,…,2,1$ 依次重复一下步骤:
$x_t$ + t_embedding ——> (Unet) ——> predicted noise
$x_t$ - predicted_noise ——> $x_{t-1}$
循环结束得到$x_0$
单步逆扩散过程:
1 | |
循环逆扩散过程:
1 | |
从N(0,1)中采样$x_T$
对 $T, T-1, T-2,…,2,1$ 依次重复一下步骤:
$x_t$ + t_embedding ——> (Unet) ——> predicted noise
$x_t$ - predicted_noise ——> $x_{t-1}$
循环结束得到$x_0$